Crab Detection System
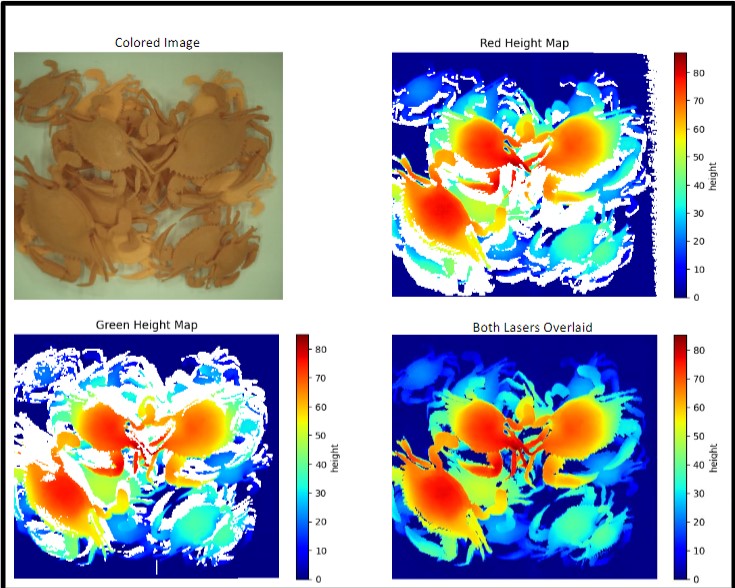
Developed a ROS 2-based vision system for real-time object detection using Stereo Cameras and LiDAR, reducing human intervention by 75% and increasing throughput by 30%
I'm a Robotics Engineer pursuing my Master's at the University of Maryland. I specialize in autonomous systems, robotics, and computer vision. Scroll down to explore my projects and get in touch!
I am a graduate robotics student passionate about building intelligent robotic systems. Currently, I am pursuing my Master’s in Robotics Engineering at the University of Maryland, College Park, where I am developing expertise in autonomous systems, computer vision, and AI.
My academic foundation includes a Bachelor's degree in Mechanical Engineering with a minor in Robotics from IIT Jodhpur. During my time there, I worked on several challenging projects, including object detection using LiDAR, reinforcement learning for robotic gait control, and human-following robots.
In addition to my academic pursuits, I completed an internship as a **MITACS Globalink Research Intern** at the University of Alberta, where I worked on quadruped gait control using reinforcement learning. This experience allowed me to develop a ROS 2-based torque control system, which improved efficiency and reduced power consumption for robotic systems. I also gained valuable experience integrating CI/CD pipelines and developing custom ROS 2 plugins.
Beyond software, I am also passionate about **robot design** and have a strong proficiency in **SolidWorks**. My interests in design are complemented by hands-on experience with mechanical and CAD systems, allowing me to create efficient and functional robotic models.
My technical skills span Python, C++, ROS 2, TensorFlow, and OpenCV. I am particularly interested in designing robotic systems, building software for robots, exploring advanced computer vision techniques, and path planning. My academic journey and professional experiences have equipped me with the hands-on skills needed to solve complex robotics challenges and make a meaningful impact in the field.
Developed a ROS 2-based vision system for real-time object detection using Stereo Cameras and LiDAR, reducing human intervention by 75% and increasing throughput by 30%
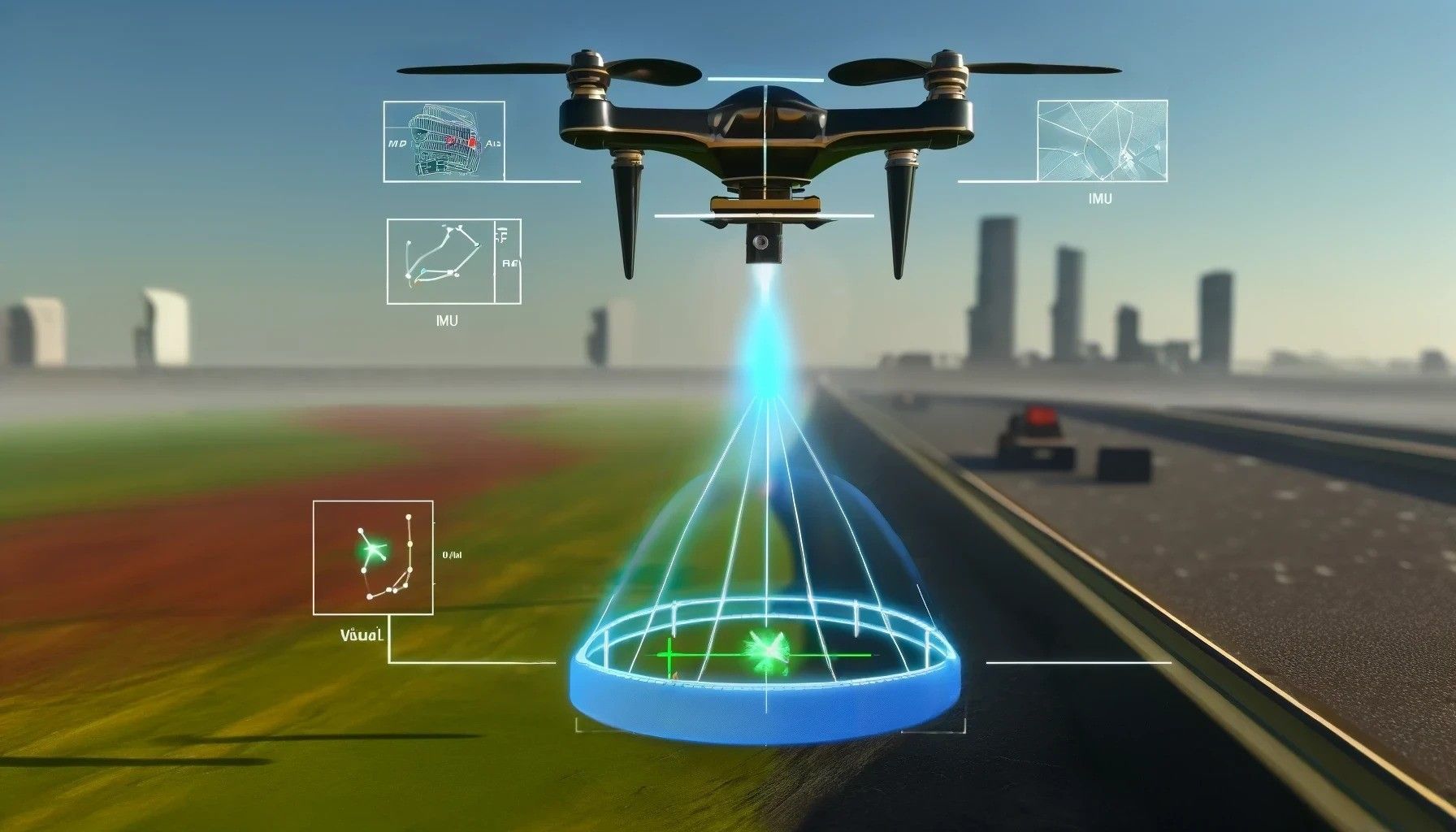
Improved UAV localization accuracy by 40% using visual odometry with ArUco markers and LiDAR data. Applied a sensor fusion algorithm combining GPS, IMU, and vision data in C++ for precise trajectory control. Simulated UAV flight paths using Gazebo and RViz, ensuring reliable trajectory control in dynamic environments.

Led a team of 4 to develop and program an autonomous drone capable of track following and obstacle avoidance. Optimized control parameters using Simulink, testing in real-time on drone hardware, achieving precise control. Integrated multiple sensors, including an IMU and RGB camera, for enhanced flight stability and obstacle avoidance.

Led the design and manufacturing of a high-performance braking system for an electric All-Terrain Vehicle using SolidWorks and AutoCAD, reducing component weight by 15% through material selection and CAD analysis. Conducted structural and thermal analysis using ANSYS to ensure mechanical performance and durability. Performed dynamic simulations for braking efficiency, reducing response time by 10% and wear by 12%.
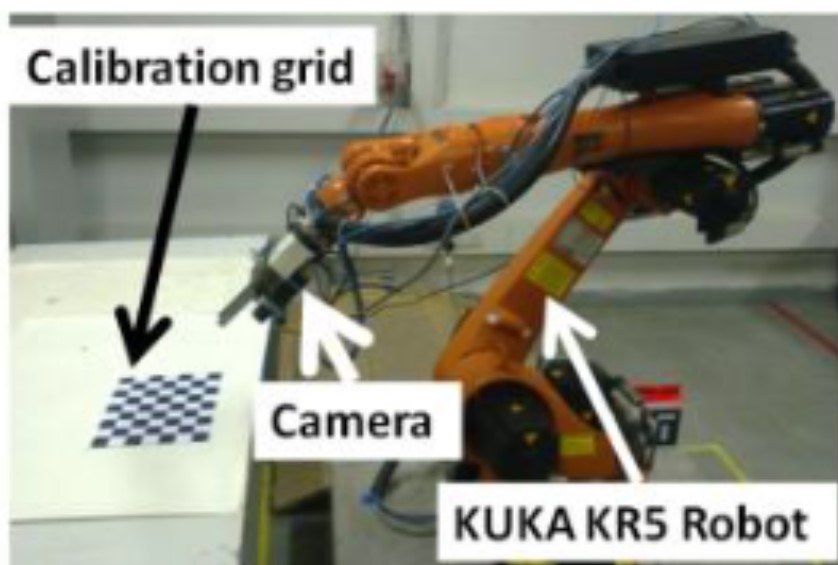
Formulated a single-image approach to measure the 6D position of industrial robots using an uncalibrated camera. Applied this approach for kinematic parameter identification and successfully implemented it on the KUKA KR5 Arc robot.

Developed a ROS 2 pipeline in C++ to enable teleoperation of robot swarms for autonomous coordination tasks. Implemented real-time depth estimation and swarm coordination using the Iterative Closest Point approach. Simulated multi-robot control behaviors in Gazebo using C++, ensuring real-time communication.

Devised control algorithms using non-linear modern predictive control for local actuator control, improving system performance by 90%. Implemented Gaussian Process Regression for voltage prediction with Bayesian search for hyperparameter optimization, leading to enhanced actuator performance. Simulated the control procedure using Matlab and Python, optimizing both global and local control systems.

Implemented a ROS 2-based torque control system, optimizing payload transport, increasing efficiency by 25%, and reducing power consumption by 15%. Integrated reinforcement learning for motion planning accuracy.
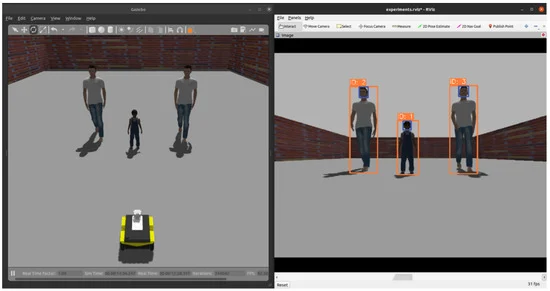
Created a ROS 2-based control system for human-following robots using LiDAR, increasing tracking accuracy by 35% and deploying the system using Docker.
If you’re interested in my work or want to get in touch, feel free to reach out using the form below or connect with me on LinkedIn or GitHub!